


Product Summary:
The principle of the MTM3 Suspension slider magnetostrictive sensor is to generate a strain pulse signal when two different magnetic fields intersect, and then calculate the time period required for this signal to be detected, thus calculating the exact position. One comes from a permanent magnet in the ring and the other from an excitation pulse generated by an electronic component in the sensor's electronics chamber. The excitation pulse runs at the speed of sound along a waveguide wire made of magnetostrictive material inside the sensor. When intersecting with the permanent magnetic field in the magnetic ring, the mechanical vibration generated by the waveguide wire forms a strain pulse due to the magnetostriction phenomenon. The strain pulse is quickly detected by a sensing circuit in the electronic chamber. MTM3 Suspension magnetostrictive sensor from the moment of excitation pulse to the time when the strain pulse is detected multiplied by a fixed speed of sound, we can accurately calculate the magnet position change. The process is continuous, so every time the position of the ring changes, a new position is quickly measured. Since the output signal is a true value, rather than a proportional or re-amplified signal, there is no signal drift or change of value, let alone the need for periodic rescale as with other sensors.
- Product Overview
- Technical Parameters
- Size selection
MTM3 Suspension Slider Magnetostrictive sensor overview:
In ferromagnetic material, the change of magnetization direction will cause the change of dielectric lattice spacing, so that the length and volume of ferromagnetic material change, namely: magnetostriction phenomenon, also known as the Widman effect, and its inverse effect is known as the Villari effect.
Performance parameter
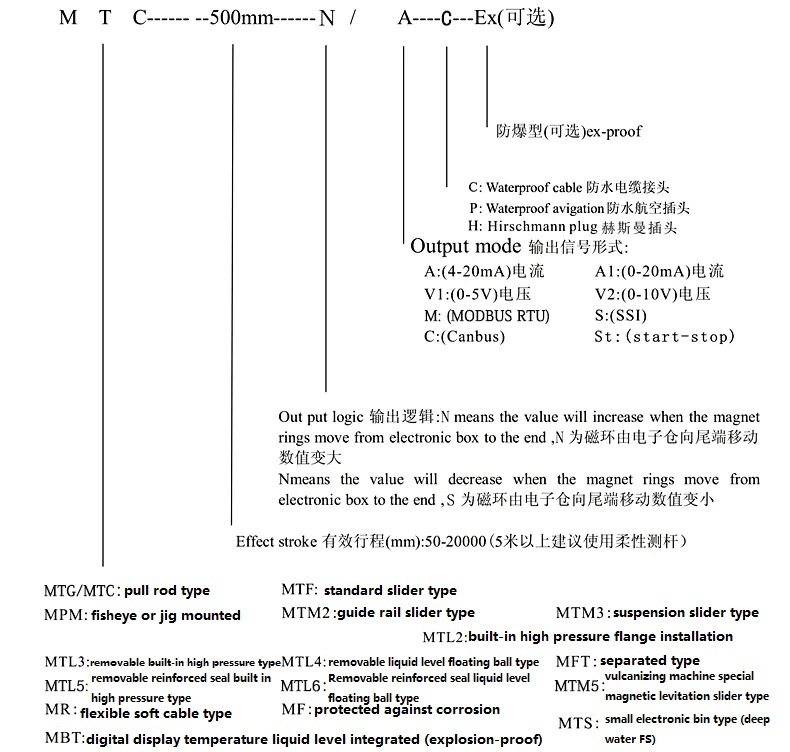
1. Measuring range :30 ~ 3000mm
Connection method
Before connecting cables, ensure that the power supply meets the requirement of +24VDC and that the output power of the power supply is greater than or equal to 95mA for each sensor. If the power supply cannot meet the requirements, replace the power supply to ensure the normal operation of the sensor.
Analog signal output wiring mode of MTM Slider magnetostrictive displacement sensor:
The sensor has five contacts: positive power supply (brown), negative power supply (black), positive signal output (blue), negative signal output (white), shell ground (shielded line)
2. Wiring mode of aviation plug:
The sensor has five contacts: (1) positive power supply (brown), (2) negative power supply (black), (3) positive signal output (blue), (4) negative signal output (white), (5) shell (shielded line)
3. Connection mode of Hersman plug:
The sensor has four contacts: (1) positive power supply (brown), (2) positive signal output (blue), (3) negative power supply (black, white) E, shell ground (shielded line)

Installation Dimension